When scientists are using remote-control submersibles to study deep-sea organisms, it's understandable that they'd want to harmlessly capture fragile-bodied animals such as jellyfish or octopi in order to get a closer look at them. Well, Harvard University's Rotary Actuated Dodecahedron (RAD) sampler is designed for just such a purpose.
The origami-inspired device is flat(ish) when not activated, and consists of five 3D-printed hinged polymer "petals" which are attached to a series of interlinked rotating joints. Thanks to the design of the joints and the shape of the petals, when a single motor applies torque to the point where the petals meet, the whole thing folds up into a hollow dodecahedron box.
Any small, delicate creature that's located immediately in front of the device gets safely captured within that transparent box as it's folding into shape, allowing scientists to study it using the submersible's cameras. The animal is subsequently let go by releasing the torque on the petals, causing the dodecahedron to unfold.
The technology stems from research performed by Dr. Zhi Ern Teoh (pictured below) when he was a graduate student, and was designing flat microrobots that could fold into shape via a motor. Dr. Brennan Phillips, who was working in the same lab as Teoh at the time, suggested that he apply his design to a system for collecting marine organisms.
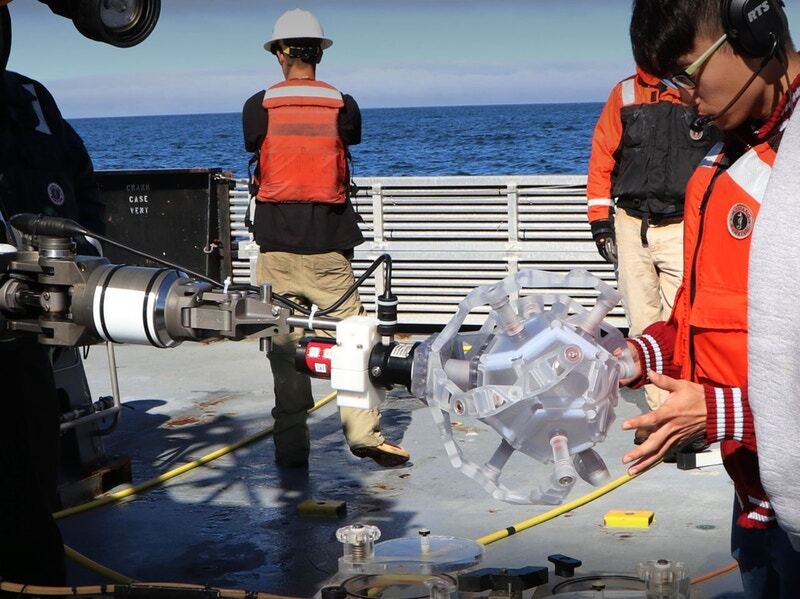
The resulting prototype RAD sampler was subsequently used to safely catch jellyfish at Connecticut's Mystic Aquarium. It went on to be field-tested in the Pacific Ocean at depths of 500 to 700 meters (1,600 to 2,300 ft), attached to the end of the manipulator arm on an ROV (remotely-operated vehicle). Controlled by a surface-located operator using a joystick, it was able to capture and release animals such as squids and jellyfish without harming them.
Plans now call for a camera and other sensors to be built directly into the device, allowing scientists to get a clearer and closer view of its inhabitants, while also collecting data such as the animal's genome.
"The RAD sampler design is perfect for the difficult environment of the deep ocean because its controls are very simple, so there are fewer elements that can break. It's also modular, so if something does break, we can simply replace that part and send the sampler back down into the water," says Teoh. "This folding could also be well-suited to be used in space, which is similar to the deep ocean in that it's a low-gravity, inhospitable environment that makes operating any device challenging."
Teoh is now an engineer at tech firm Cooper Perkins, while Phillips has moved on to the University of Rhode Island. A paper on the research was recently published in the journal Science Robotics.
You can see the RAD sampler in action, in the following video.
Source: Wyss Institute at Harvard University